侯文莉
安科瑞電氣股份有限公司 上海嘉定 201801
摘 要:介紹了一起因直流電源接線松動(dòng)導(dǎo)致所帶整段馬達(dá)保護(hù)器裝置停電從而造成電機(jī)大面積停機(jī)的事故�,分析了大面積電機(jī)停機(jī)的直接原因和間接原因,針對(duì)存在的問題提出了整改措施和方案��,對(duì)馬達(dá)保護(hù)器設(shè)計(jì)邏輯進(jìn)行了修改,同時(shí)通過DCS組態(tài)增加了后臺(tái)監(jiān)控報(bào)警���。
關(guān)鍵詞:馬達(dá)保護(hù)器�����;電機(jī)停機(jī)��;DCS組態(tài)
1故障情況
2020年5月12日9時(shí)57分����,工作人員發(fā)現(xiàn)某裝置某單元部分空冷和水泵電機(jī)突然無故停機(jī),內(nèi)操迅速通知外操趕到現(xiàn)場(chǎng)將無故停機(jī)的設(shè)備現(xiàn)場(chǎng)起動(dòng)���,并通知維保電氣人員檢查停機(jī)情況����。
現(xiàn)場(chǎng)檢查后����,未發(fā)現(xiàn)電機(jī)存在故障情況,變電所內(nèi)系統(tǒng)無異常�,無備自投動(dòng)作情況,外操現(xiàn)場(chǎng)手動(dòng)起動(dòng)的設(shè)備正常運(yùn)行中無異常�,但I(xiàn)MCS系統(tǒng)監(jiān)控屏上有大量電機(jī)報(bào)“通信故障"及“接觸器運(yùn)行"的記錄。通過檢查�����,報(bào)警的電機(jī)均是變電所內(nèi)SL5II段母線的電機(jī)�����。同時(shí)通過向外操了解停機(jī)情況發(fā)現(xiàn)無故停機(jī)設(shè)備集中在變電所內(nèi)SL5II段母線上��。
2原因分析
由停電設(shè)備分布情況可知�,出現(xiàn)某段集中大面積停機(jī)的可能性有以下兩種�����。
(1)系統(tǒng)出現(xiàn)晃電��,電壓波動(dòng)導(dǎo)致SL5II段母線上電機(jī)大面積停電���。從現(xiàn)場(chǎng)現(xiàn)象來看,上游系統(tǒng)II段未出現(xiàn)波動(dòng)�,變電所內(nèi)其他II段低壓系統(tǒng)未出現(xiàn)波動(dòng),僅SL5II段出現(xiàn)大面積停機(jī)��,同時(shí)備自投未有動(dòng)作信息��。另外如果短時(shí)晃電����,低壓電機(jī)馬達(dá)保護(hù)器具有再起動(dòng)功能�����,可實(shí)現(xiàn)電機(jī)晃電再起動(dòng)���,不會(huì)導(dǎo)致電機(jī)全部停機(jī)�,而且馬達(dá)保護(hù)器MCU取得的電源是直流24V電源,系統(tǒng)晃電不應(yīng)導(dǎo)致SL5II段上運(yùn)行的馬達(dá)保護(hù)器在IMCS系統(tǒng)上都報(bào)“通信故障"����。綜合判斷后,排除無故停機(jī)原因是系統(tǒng)出現(xiàn)晃電�����。
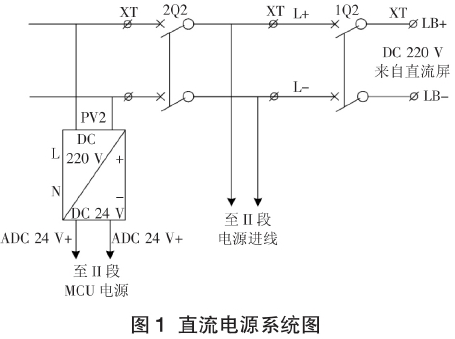
(2)直流電源出現(xiàn)異常��。直流電源系統(tǒng)圖如圖1所示�����。由此可知�,SL5II段MCU直流24V電源均從直流系統(tǒng)通過單相直流變壓器取得,一旦單相變壓器后直流系統(tǒng)失電����,整段系統(tǒng)上的運(yùn)行或熱備狀態(tài)下的MCU就會(huì)失電,并在IMCS系統(tǒng)上報(bào)“通信故障"����。
為了驗(yàn)證馬達(dá)保護(hù)器在失電情況下的IMCS報(bào)警情況以接觸器動(dòng)作情況,選取備用抽屜進(jìn)行試驗(yàn)����,模擬運(yùn)行情況下馬達(dá)保護(hù)器突然失電動(dòng)作情況�����,結(jié)果顯示馬達(dá)保護(hù)器在失電情況下會(huì)導(dǎo)致電機(jī)停機(jī)���,同時(shí)報(bào)“××電機(jī)通信故障",恢復(fù)馬達(dá)保護(hù)器電源后報(bào)“××電機(jī)通信故障"及“××電機(jī)接觸器運(yùn)行"(此情況與SL5II段IMCS上的報(bào)警情況一致)����。
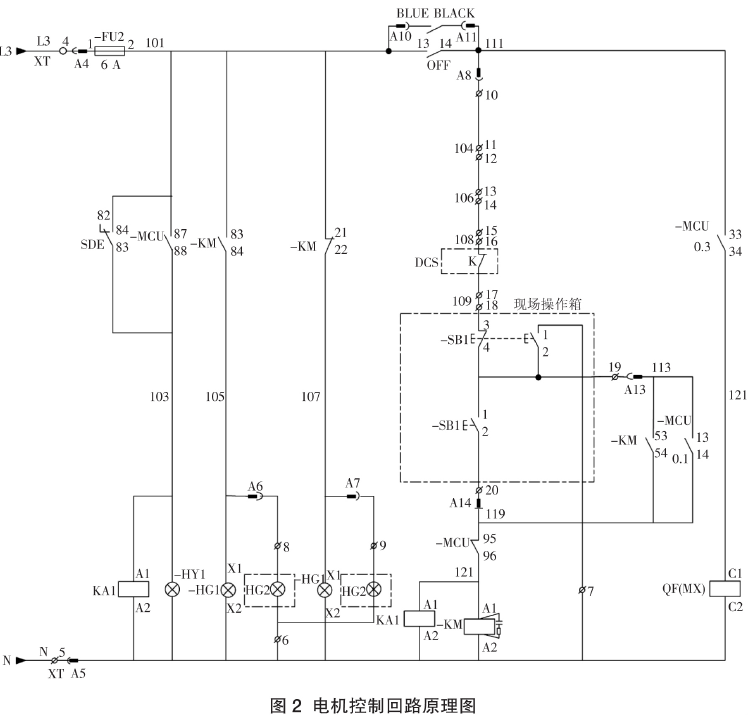
對(duì)照電機(jī)控制回路原理圖(如圖2所示),可知原理圖設(shè)計(jì)上不存在缺陷����,馬達(dá)保護(hù)器MCU故障輸出點(diǎn)為常閉點(diǎn)�����,在失電情況下不應(yīng)斷開控制回路���。
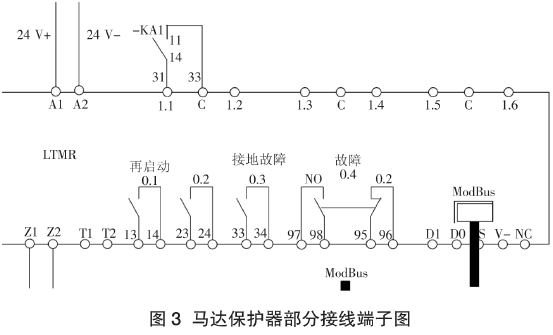
馬達(dá)保護(hù)器部分接線端子如圖3所示��。對(duì)馬達(dá)保護(hù)器進(jìn)行檢查��,“97-98"“95-96"兩對(duì)觸點(diǎn)在控制原理圖上分別為常開和常閉����,但正常無電情況下“97-98"為常閉、“95-96"為常開���,與控制原理圖不符�。
與馬達(dá)保護(hù)器廠家溝通后��,廠家答復(fù)是此馬達(dá)保護(hù)器設(shè)計(jì)原理為只要上電后馬達(dá)保護(hù)器內(nèi)故障輸出繼電器得電兩對(duì)觸點(diǎn)狀態(tài)變化一次�,當(dāng)出現(xiàn)故障后,馬達(dá)保護(hù)器內(nèi)故障輸出繼電器失電“95-96"觸點(diǎn)變回原來常開狀態(tài)�,斷開控制回路停下電機(jī)。
這種設(shè)計(jì)理念是:馬達(dá)保護(hù)器失電也是一種大的故障�����,此時(shí)馬達(dá)保護(hù)器對(duì)電機(jī)已經(jīng)不存在保護(hù)�����。為了避免電機(jī)出現(xiàn)故障時(shí)馬達(dá)保護(hù)器不能及時(shí)進(jìn)行保護(hù)從而造成電機(jī)損壞����,應(yīng)馬上停掉電機(jī)��。另外���,上電故障輸出繼電器變位可確認(rèn)故障輸出繼電器*,保證故障情況下動(dòng)作可靠性�����。
綜合原因分析及現(xiàn)場(chǎng)檢查�����,此次某單元大面積電機(jī)停電直接原因?yàn)镾L5II段馬達(dá)保護(hù)器直流電源二次回路接線松動(dòng)導(dǎo)致����;間接原因?yàn)轳R達(dá)保護(hù)器邏輯設(shè)計(jì)不合理,設(shè)計(jì)存在缺陷��。
3整改及預(yù)防措施
(1)全面檢查馬達(dá)保護(hù)器直流電源接線���,緊固接線端子。
(2)修改馬達(dá)保護(hù)器故障輸出邏輯�。確認(rèn)更新邏輯,將全廠同型號(hào)的馬達(dá)保護(hù)器故障輸出觸點(diǎn)按控制原理圖改為正常情況下“97-98"為常開��、“95-96"為常閉,存在故障時(shí)故障輸出繼電器動(dòng)作變位�,跳開電機(jī)控制回路。修改與不修改邏輯風(fēng)險(xiǎn)分析評(píng)估如下���。
①保持原有邏輯不變����。當(dāng)馬達(dá)保護(hù)器直流電源失電后�,電機(jī)停機(jī)。直流電源存在故障將導(dǎo)致裝置電機(jī)大面積停電�����,直接影響裝置生產(chǎn)安全�����、平穩(wěn)��,影響范圍大�。
②修改邏輯。當(dāng)馬達(dá)保護(hù)器失電后�����,馬達(dá)保護(hù)器對(duì)電機(jī)不存在保護(hù)。電機(jī)無保護(hù)���,一旦電機(jī)存在故障不能及時(shí)跳閘����,電機(jī)就將燒壞����,但抽屜斷路器能分?jǐn)喽搪冯娏鳎薅ü收戏秶?�。降低風(fēng)險(xiǎn)措施:巡檢關(guān)注IMCS上報(bào)警情況����,及時(shí)發(fā)現(xiàn)馬達(dá)保護(hù)器失電情況,但I(xiàn)MCS上系統(tǒng)數(shù)據(jù)較多���,可能無法及時(shí)發(fā)現(xiàn)����;每個(gè)抽屜加裝操作面板�,從面板電源指示燈可迅速判斷馬達(dá)保護(hù)器失電情況;增加直流電源報(bào)警指示燈���,時(shí)刻監(jiān)視直流電源情況���;利用馬達(dá)保護(hù)器失電IMCS系統(tǒng)上報(bào)“通信故障"取反與電機(jī)運(yùn)行狀態(tài)在DCS作一個(gè)“與"邏輯,當(dāng)電機(jī)運(yùn)行時(shí)�,馬達(dá)保護(hù)器失電輸出報(bào)警到監(jiān)控,可消除風(fēng)險(xiǎn)�����。
根據(jù)風(fēng)險(xiǎn)分析評(píng)估���,選擇修改邏輯��,馬達(dá)保護(hù)器失電情況下不停機(jī)造成的風(fēng)險(xiǎn)遠(yuǎn)小于不修改邏輯直流失電造成的風(fēng)險(xiǎn)����,因此選擇對(duì)馬達(dá)保護(hù)器邏輯進(jìn)行修改���,保證馬達(dá)保護(hù)器電源在失電或晃電的情況下不跳開電機(jī)�,保證電機(jī)持續(xù)運(yùn)行�����。
同時(shí),為降低修改邏輯后馬達(dá)保護(hù)器失電情況下電機(jī)無保護(hù)運(yùn)行帶來的風(fēng)險(xiǎn)����,后續(xù)可實(shí)施的措施有:增加操作面板,及時(shí)發(fā)現(xiàn)馬達(dá)保護(hù)器失電故障�����;增加直流電源報(bào)警指示燈����,時(shí)刻監(jiān)視直流電源情況;增加后臺(tái)DCS報(bào)警�����。
根據(jù)風(fēng)險(xiǎn)評(píng)估制定整改方案��,確定更新馬達(dá)保護(hù)器圖3中0.4故障輸出點(diǎn)的邏輯���,對(duì)0.4繼電器由故障釋放���,修改為故障動(dòng)作��,取反邏輯為:
//LOAD_TMP_BIT 15 15
LOAD_NOT_TMP_BIT 15 15 //reverse logic for 0.4
SET_TMP_BIT 19 15 //Image of Output L04
邏輯更新完成之后再將圖3中“95-96"“97-98"兩對(duì)觸點(diǎn)接線對(duì)調(diào)���。
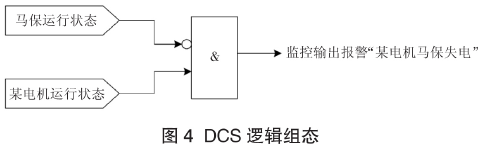
(3)將IMCS系統(tǒng)電機(jī)馬達(dá)保護(hù)器運(yùn)行狀態(tài)傳到DCS���,電機(jī)馬達(dá)保護(hù)器運(yùn)行狀態(tài)取反與
電機(jī)運(yùn)行狀態(tài)在DCS后臺(tái)組態(tài):馬達(dá)保護(hù)器未上電取0���、電機(jī)未運(yùn)行取0,此邏輯為當(dāng)電機(jī)在運(yùn)行情況(狀態(tài)為1)下�,馬達(dá)保護(hù)器失電(狀態(tài)取反為1)輸出“某電機(jī)馬達(dá)保護(hù)器失電"告警至后臺(tái)監(jiān)控,監(jiān)盤人員發(fā)現(xiàn)此告警迅速通知維保電氣人員查找故障�,邏輯如圖4所示。
4安科瑞智能電動(dòng)機(jī)保護(hù)器介紹
4.1產(chǎn)品介紹
智能電動(dòng)機(jī)保護(hù)器(以下簡(jiǎn)稱保護(hù)器)��,采用單片機(jī)技術(shù)���,具有抗干擾能力強(qiáng)����、工作穩(wěn)定可靠��、數(shù)字化����、智能化�、網(wǎng)絡(luò)化等特點(diǎn)�����。保護(hù)器能對(duì)電動(dòng)機(jī)運(yùn)行過程中出現(xiàn)的過載����、斷相、不平衡����、欠載、接地/漏電���、堵轉(zhuǎn)��、阻塞�、外部故障等多種情況進(jìn)行保護(hù)�����,并設(shè)有SOE故障事件記錄功能��,方便現(xiàn)場(chǎng)維護(hù)人員查找故障原因。適用于煤礦�����、石化�����、冶煉����、電力�����、以及民用建筑等領(lǐng)域�����。本保護(hù)器具有RS485遠(yuǎn)程通訊接口��,DC4-20mA模擬量輸出�,方便與PLC、PC等控制機(jī)組成網(wǎng)絡(luò)系統(tǒng)���。實(shí)現(xiàn)電動(dòng)機(jī)運(yùn)行的遠(yuǎn)程監(jiān)控���。
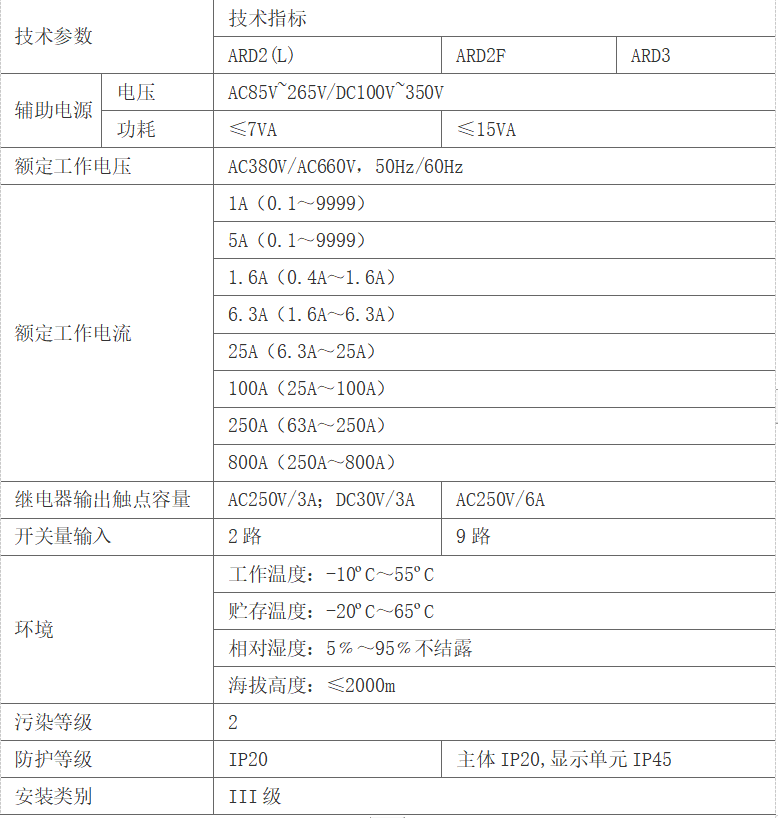
4.2技術(shù)參數(shù)
4.2.1數(shù)字式電動(dòng)機(jī)保護(hù)器
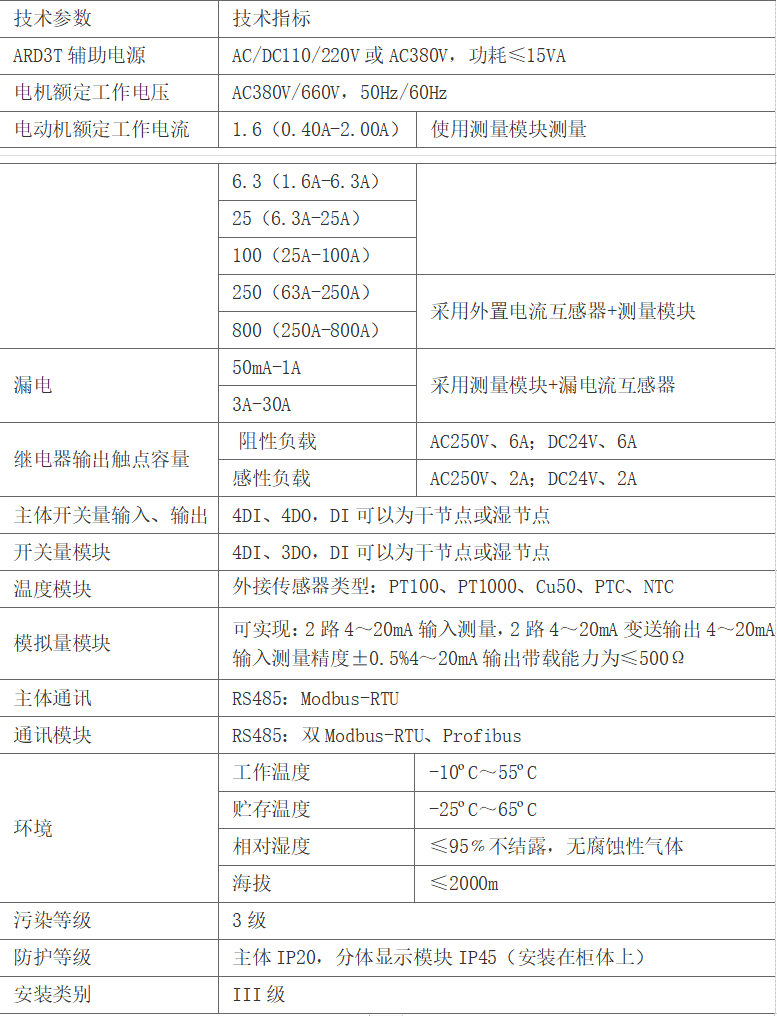
4.2.2模塊式電動(dòng)機(jī)保護(hù)器
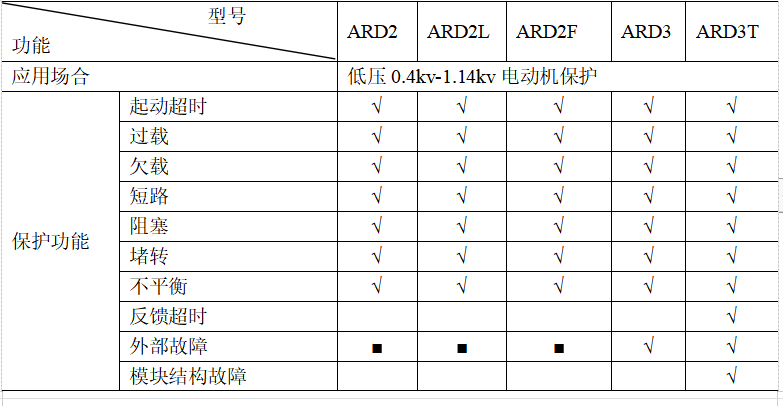
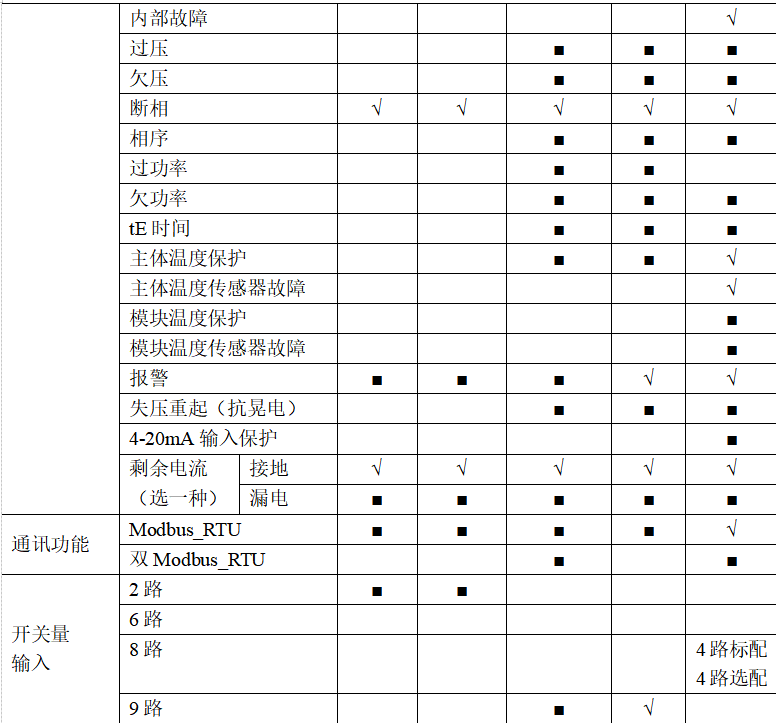
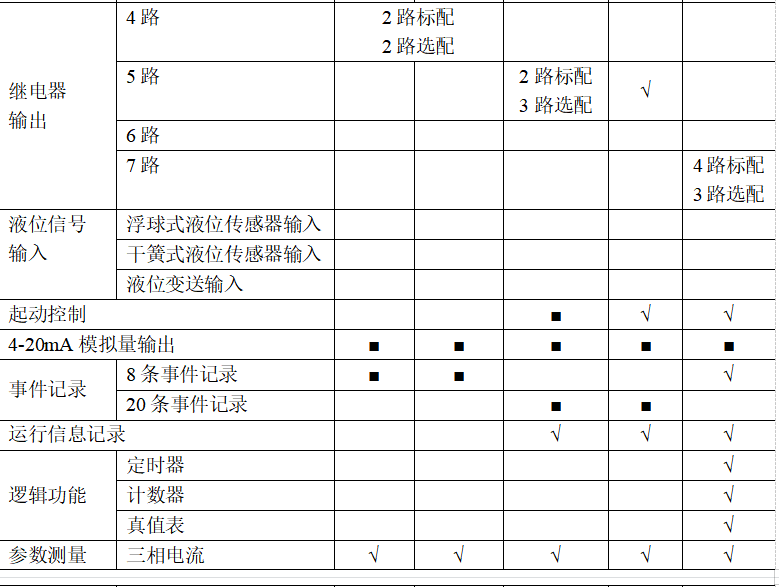
4.3產(chǎn)品選型
說明:“√"表示具備�����,“■"表示可選�。
5結(jié)束語
本次裝置電機(jī)大面積停機(jī)的直接原因是變電所內(nèi)SL5II段馬達(dá)保護(hù)器直流電源施工階段二次回路接線緊固不到位����,間接原因是馬達(dá)保護(hù)器邏輯設(shè)計(jì)不合理,設(shè)計(jì)存在缺陷導(dǎo)致故障擴(kuò)大化���。為保證馬達(dá)保護(hù)器直流電源故障情況下不導(dǎo)致設(shè)備誤停從而造成裝置意外停工����,修改馬達(dá)保護(hù)器輸出邏輯���,同時(shí)驗(yàn)證了通過DCS組態(tài)進(jìn)行馬達(dá)保護(hù)器失電告警的方案是可行的����。
參考文獻(xiàn)
[1]陳國(guó)雄,高立平.馬達(dá)保護(hù)器裝置電源掉電導(dǎo)致電機(jī)停機(jī)原因分析處理
[2]安科瑞企業(yè)微電網(wǎng)設(shè)計(jì)與應(yīng)用手冊(cè).2020.06版
作者簡(jiǎn)介:侯文莉����,女,安科瑞電氣股份有限公司����,主要研究方向?yàn)橹悄茈娋W(wǎng)供配電